
Ref SKU: 22668
Option 1,
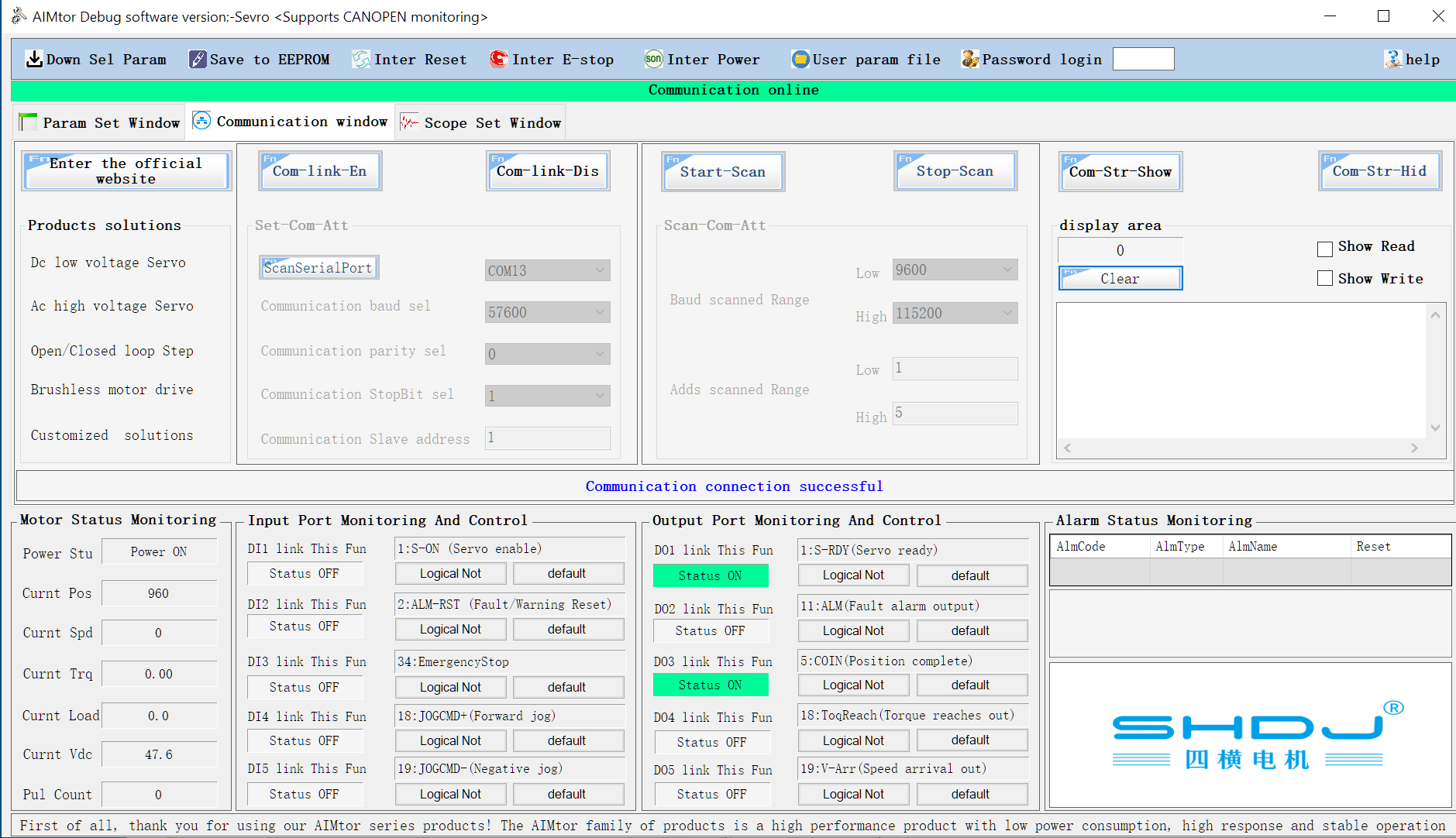
Manufacture provided the AIMtor Debug software, can be downloaded from manufacture’s website (There is English version when starting the software : http://sihongmotor.cn/userfile/productPic/20250719113929.zip
- Scan the avaiable serial ports, and make a connection, the status bar will show ‘communication online’ (green)
- In the Parameter window, check the default Speed (RPM). H06-04. The default value is 100 (Maximum RPM can be 3000). Test the motor from slower speed for safe.
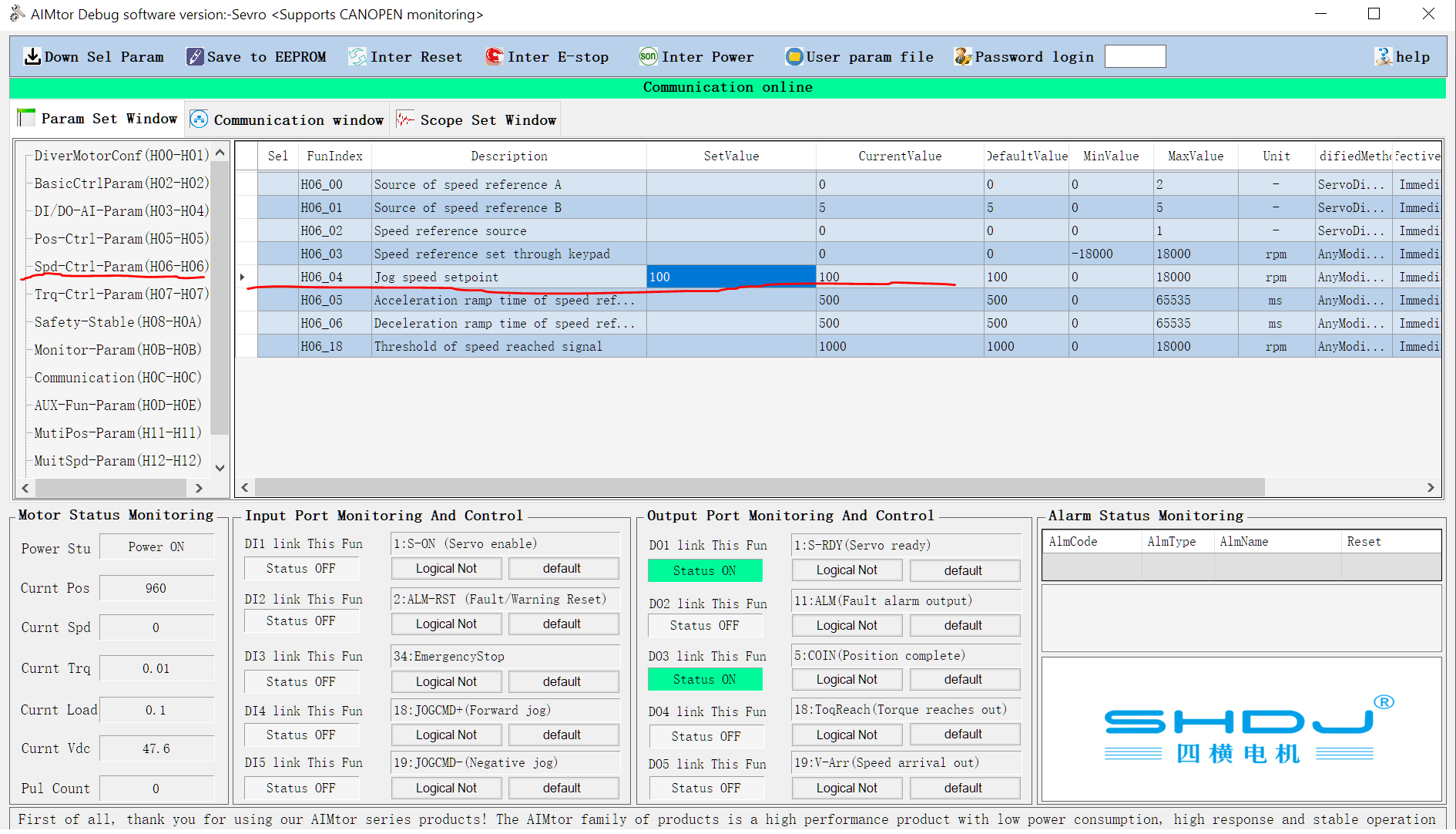
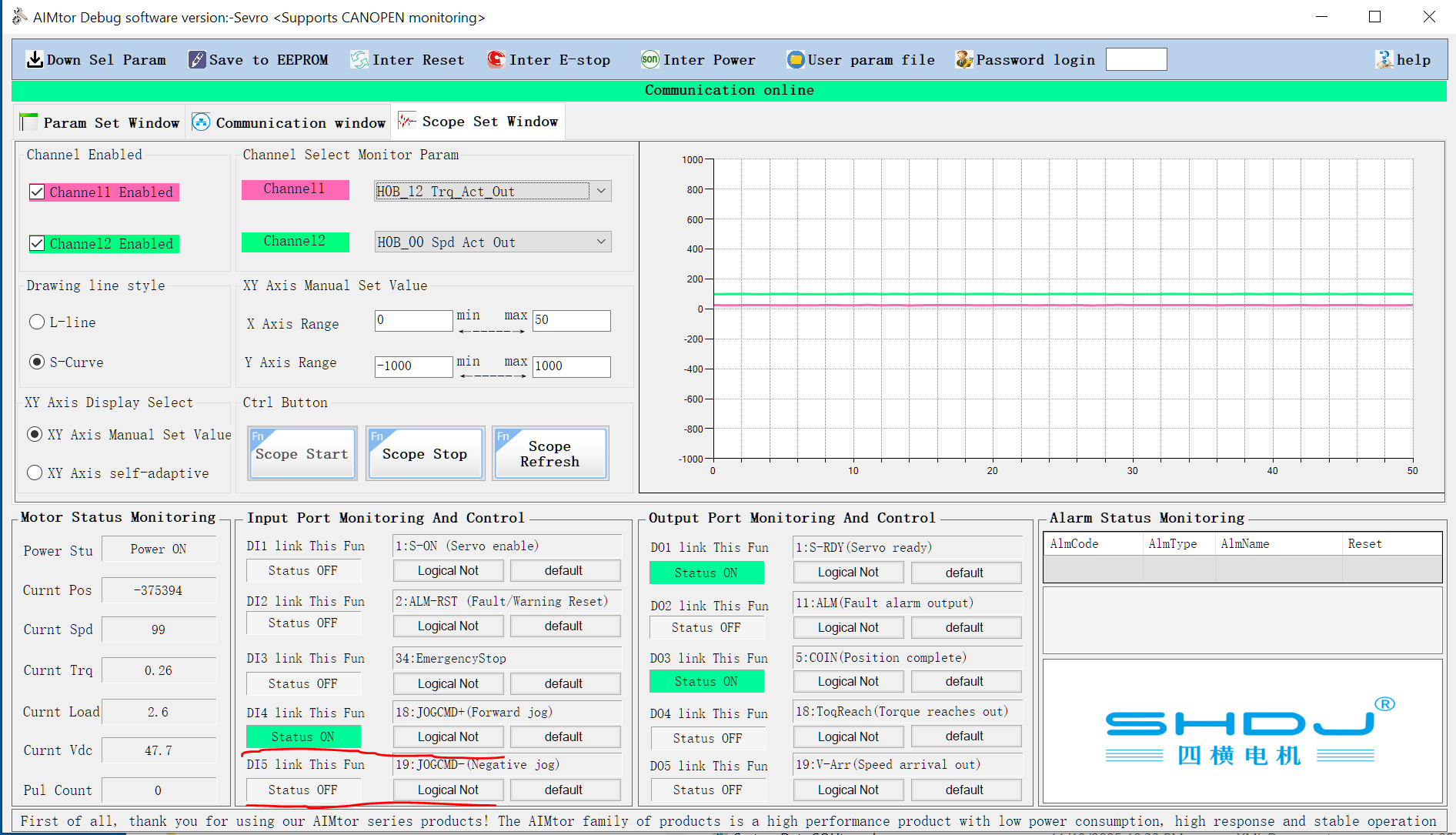
- To start the testing, click the Forwad job or Negative jog. ‘Default’ to stop the jog
Option 2. Without using Debug software. Using Python instead. Sample Python code:
# RS485 Port
# USB->RS485 Adapter
import serial
import time
ser = serial.Serial(
port='COM13', # COM port number from windows
baudrate=57600,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=0.5
)
def start_motor():
cmd = bytes([0x01, 0x10, 0x03, 0x09, 0x00, 0x01, 0x02, 0x00, 0x01, 0x54, 0x09])
# Send command to motor
ser.write(cmd)
print("Command sent!")
# Wait briefly for a response
time.sleep(0.05)
response = ser.read(64) # read up to 64 bytes
print("Motor response:", response.hex(' '))
def stop_motor():
cmd = bytes([0x01, 0x10, 0x03, 0x09, 0x00, 0x01, 0x02, 0x00, 0x00, 0x95, 0xC9])
# Send command to motor
ser.write(cmd)
print("Command sent!")
# Wait briefly for a response
time.sleep(0.05)
# Read the response (motor should reply)
response = ser.read(64) # read up to 64 bytes
print("Motor response:", response.hex(' '))
start_motor()
time.sleep(3)
stop_motor()
ser.close()